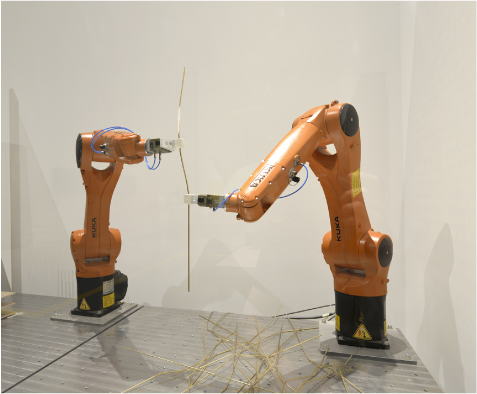
Brass Swarm is an experimental prototype developed through self-organisational algorithmic design processes and robotic fabrication. The project explores spatial self-organisation, emergent tectonics and the relationship between robotic and algorithmic behavior. A multi-agent algorithmic strategy for spatial self-organisation was developed, from which topological surfaces emerge.